
En esta entrada queremos ofrecer
una explicación detallada sobre aquellos circuitos
de protección que se pueden implementar en interruptores, parte esencial de los convertidores de potencia.
Muchos de los conceptos que se
comentan en esta entrada son de nivel
avanzado, dedicado a muchos usuarios con alto grado de conocimiento que nos
comentaron algunas propuestas a partir de la entrada anterior “conectar relé a la cama caliente”,
pero hemos intentado que las explicaciones sean entendibles para muchos otros
usuarios menos experimentados para que podamos aprender todos.
Estos circuitos de amortiguamiento o snubbers tienen la función de
suprimir o suavizar los picos de voltaje e intensidad y amortiguar la
oscilación transitoria.

Para identificar en un circuito el
estado en que se encuentra, podemos ver la siguiente imagen donde se muestra un
circuito con su parte transitoria,
en la fase de carga del condensador, y la fase permanente, cuando las condiciones no varían en el tiempo.
Además, en el estudio y análisis de
circuitos, se distinguen dos etapas:
-El régimen transitorio, viene dado por la solución general de la
ecuación diferencia lineal que describe el circuito.
-El régimen permanente se obtiene de la solución particular.
Para el estudio de circuitos simples donde se utilizan ecuaciones diferenciales lineales de primer y segundo orden, pero para circuitos más complejos, se utiliza la transformada de Laplace.
El amortiguamiento, nos indica la evolución del transitorio.
Por eso, en los relés, la simple
acción de conmutación se considera un estado transitorio y debemos conocer el
daño que pueden causar al resto de componentes, aunque en muchos casos, es
suficiente con colocar un diodo.
Para conocer qué tipo de protección
debemos implementar, realizamos un estudio de variables del circuito para
garantizar que nuestro diseño adecuado ofrece estabilidad, eficiencia
y menor EMI.
Existen varios métodos de control y
protección de interruptores, como uso de transistores,
mosfet, optoacopladores, tiristores,
tiristores bidireccionales (triac y
alternistor), circuitos RC o RL…
Para comenzar esta explicación, nos
centraremos en el circuito de protección más popular por su simpleza y gran
aplicación, el circuito RC.
Circuito RC:
Un circuito RC está formado por una resistencia y un condensador,
conectado en serie o en paralelo, y que realizan la función de filtro. Este filtrado, permite pasar
rangos de frecuencia por encima o por debajo de valores que se establecen
dependiendo del tipo de resistencia y condensador que tenga nuestro circuito de
protección.
A continuación explicamos cómo hallar los parámetros de intensidad y capacidad del condensador para un circuito de protección RC Serie utilizando ecuaciones diferenciales.

Por ejemplo, tenemos un circuito RC serie con una fuerza electromotriz de 100V, cuyo valor de resistencia son 200 ohmios y una capacidad del condensador de 1x10-4 F.
Calcular:
a)q(t) si q(0)=0
b)i(t)
a)Representación matemática de caídas de voltaje en función de i(t) y en función de la carga q(t):






Para obtener la solución de la ecuación, debemos hallar su solución general a partir de la ecuación homogénea y su solución particular:

Donde:
y: es la solución completa.
yc: es la solución general.
yp: es la solución particular.
qtr: es la carga transitoria del condensador.
qs: es la carga estacionaria del condensador.
Hallamos las soluciónes:


Escribimos la solución completa de q(t), que representa la carga total del circuito:

Hallamos el valor de C para la condición en el momento inicial donde se cumple que q(0)=0 :


Por tanto, nos queda que q(t) se representa mediante la ecuación en función del tiempo:


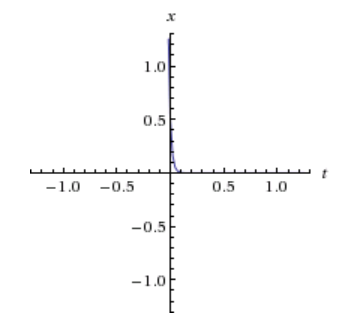
Para resolver esta ecuación mediante un calculador online como Wolfram Alpha, realizamos un cambio de variable y sustituimos la i por x:


Observamos la gráfica de i(t) a lo largo del tiempo, desde t=0 a t=infinito:
El circuito RC paralelo obtiene en
la salida un voltaje similar al voltaje de entrada, por esa razón se suele
utilizar menos, salvo que aportemos una fuente de intensidad.

TRANSISTORES (BJT y FET:
Otros sistemas de conmutación
también muy utilizados son los transistores.
Además, este componente tiene la capacidad de regular la cantidad de corriente
que circula, por lo que resulta muy práctico para regular componentes desde un
mínimo hasta un máximo pasando por los estados intermedios, por ejemplo,
regular la velocidad de un motor.
Una manera sencilla de controlar un
relé es utilizando un transistor tipo NPN. Su función, es actuar de
interruptor, cerrando el circuito que excita la bobina del relé.
Esta configuración es muy útil si
necesitamos alimentar un relé con tensiones distintas a la electrónica de
control.
Por ejemplo, tenemos Arduino Due,
cuya tensión en las salidas ya no es de 5V sino de 3.3V y disponemos de un relé
que se controla a 5V.
En este caso, no podemos conectar
el relé directamente, pues no se accionará correctamente. Para este caso,
utilizamos un transistor. De esta manera un modelo de transistor que admita
3.3V, puede controlar el relé de 5V.
Esta práctica se utiliza por que
existen diferentes tecnologías en los circuitos lógicos con rangos de voltaje
diferentes, TTL(3.3V), CMOS(5V), LVTTL(3,3V), LVCMOS(3.3V, 2,5V y 1,8V) y
componentes que exigen unos valores mínimos para su activación/desactivación:


Como podemos observar en esta imagen, para distintas familias lógicas, por ejemplo si tenemos una señal de estado bajo a 0,4V, la familia TTL a 5V funcionará, pero sin embargo, el nivel lógico para 3,3V necesita 0,5V.
Para tener la activación del relé,
es necesario que el transistor se encuentre en modo saturación, es decir, que
permita el máximo de intensidad circulando. Análogamente, sería como abrir un
grifo de agua al máximo para que deje circular la mayor cantidad de agua
posible.
Por esta razón, debemos utilizar un transistor, que conduzca por encima de los valores de voltajes que tengamos a la salida. Por ejemplo, si nuestra salida esta a 3.3V, y nuestro transistor conduce a partir de 0,7V tendremos un correcto funcionamiento y podría funcionar con salidas de control de circuitos lógicos tanto de la familia CMOS o TTL.
Por esta razón, debemos utilizar un transistor, que conduzca por encima de los valores de voltajes que tengamos a la salida. Por ejemplo, si nuestra salida esta a 3.3V, y nuestro transistor conduce a partir de 0,7V tendremos un correcto funcionamiento y podría funcionar con salidas de control de circuitos lógicos tanto de la familia CMOS o TTL.
Con todo esto ya tenemos el control
del relé, sin embargo, ahora nuestro transistor es un componente desprotegido
de sobre tensiones producidas por la fuerza contra-electromotriz (fcem) que
generan las conmutaciones. Además, el efecto de inducción en la bobina del relé
crea un campo magnético que genera un pico en dirección opuesta en el momento
de conmutación que podemos prevenir con un diodo conectado a los bornes de
contacto de la bobina del relé:

Otro tipo de transistores muy
utilizados son los llamados de efecto campo (FET). Dentro de este grupo, existe
una amplia variedad de tipos, como los MOSFET.
Para conocer que tipo de transistor
es más conveniente, debemos conocer características de la utilidad que vaya a
tener y las condiciones a las que va a ser sometido.
Sus principales prestaciones que lo
diferencian de los BJT son:
-Dispositivos controlados por
tensión. Esta ventaja a veces puede suponer un inconveniente, ya que la mayoría
de MOSFET necesitan un voltaje alto para su control en la patilla de puerta o
Gate(G), sin embargo, existen en el mercado dispositivo de control lógico
adaptados a voltajes más bajos.
-Presenta alta impedancia de
entrada: esto permite contener carga un tiempo limitado pero suficiente como
para permitir almacenamiento.
-Generan menor nivel de ruido
eléctrico.
-No son tan sensibles a la
radiación.
-Son más estables a cambios de
temperatura. En los BJT, al aumentar la temperatura, disminuye Vbe,
al disminuir Vbe, aumenta Ic, al aumentar Ic,
aumenta nuevamente la temperatura hasta llegar a un estado de no retorno que
termina con la destrucción del dispositivo.
Otro componente utilizado en los módulos de Arduino son optoacopladores (U1), que aislan el circuito de la parte lógica de control y previenen ante corrientes inversas:

Para entender mejor este diagrama, a continuación podemos ver los componentes en su placa electrónica original de Arduino, detallando cada parte del circuito:

Podemos observar que esta regleta de relés conta de 4 unidades independientes, por eso en el diagrama viene sólo explicada para 1 solo relé pues el resto son conexiones idénticas.
La forma de alimentar con una fuente externa los relés se realiza de la siguiente forma:

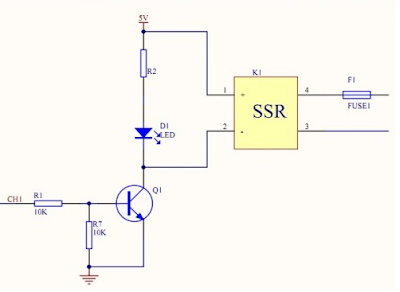
Otro sistema más compacto y silencioso son los relés de estado sólido (SSR). Su funcionamiento interno, no tiene partes móviles, por eso no emiten ruido y no sufren desgaste por movimiento de piezas.

En muchas aplicaciones se pueden implementar directamente para controlar resistencias, como las plataformas de impresión de las impresoras 3D, la desventaja de este componentes es su precio, relativamente mayor en el mercado que otros sistemas más económicos.Sin embargo, muchos proveedores y fabricantes de productos para proteger sus circuitos de control por su fiabilidad y robustez.

Para implmentar este tipo de relés en Arduino, muchos llevan un circuito de regulación mediante transistor:
Con estos tipos de componentes, hemos visto brevemente su implementación y diferentes circuitos de protección y regulación que podemos implmentar con trasistores o circuitos RC muy utilizados en la actualidad.
Esperamos que esta información os sea de utilidad.

En muchas aplicaciones se pueden implementar directamente para controlar resistencias, como las plataformas de impresión de las impresoras 3D, la desventaja de este componentes es su precio, relativamente mayor en el mercado que otros sistemas más económicos.Sin embargo, muchos proveedores y fabricantes de productos para proteger sus circuitos de control por su fiabilidad y robustez.

Para implmentar este tipo de relés en Arduino, muchos llevan un circuito de regulación mediante transistor:

Esperamos que esta información os sea de utilidad.
Un saludo a todos,
Ingenio Triana.
Los circuitos de protección en interruptores son fundamentales en cualquier instalación eléctrica. Desde fusibles simples hasta sistemas diferenciales combinados con breakers y limitadores de sobretensión, todos cumplen la función de detectar anomalías y desconectar la energía a tiempo, protegiendo a las personas, los equipos y la infraestructura eléctrica. Me dedico a instalar gas natural queretaro
ResponderEliminar